Optimization and optimal control
These notes were originally written by T. Bretl and were transcribed by S. Bout.
Optimization
The following thing is called an optimization problem:
The solution to this problem is the value of
-
We know that we are supposed to choose a value of
because " " appears underneath the “minimize” statement. We call the decision variable. -
We know that we are supposed to minimize
because " " appears to the right of the “minimize” statement. We call the cost function.
In particular, the solution to this problem is
-
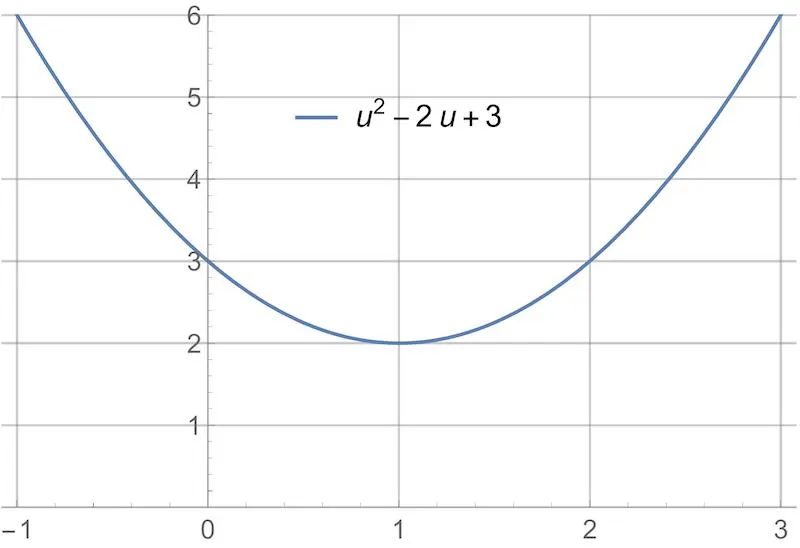
We could plot the cost function. It is clear from the plot that the minimum is at
. 
-
We could apply the first derivative test. We compute the first derivative:
Then, we set the first derivative equal to zero and solve for
: Values of
that satisfy the first derivative test are only “candidates” for optimality — they could be maxima instead of minima, or could be only one of many minima. We’ll ignore this distinction for now. Here’s a plot of the cost function and of it’s derivative. Note that, clearly, the derivative is equal to zero when the cost function is minimized: 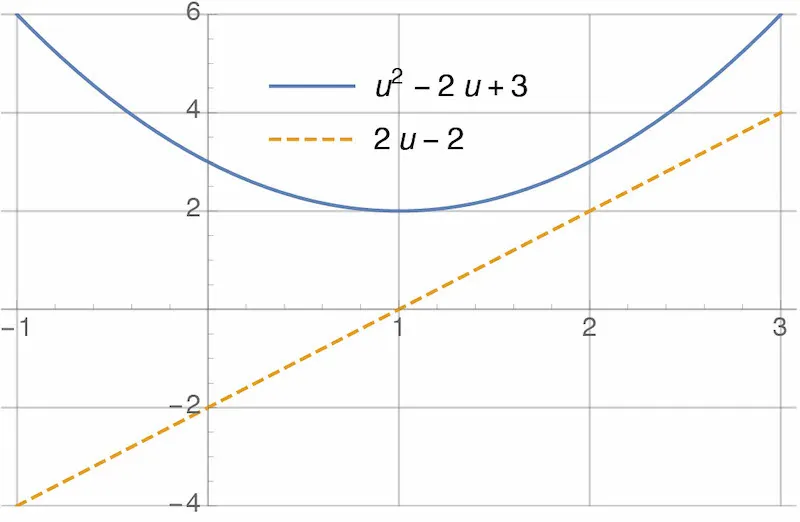
In general, we write optimization problems like this:
Again,
Here is another example:
The solution to this problem is the value of both
as small as possible. There are two differences between this optimization problem and the previous one. First, there is a different cost function:
Second, there are two decision variables instead of one. But again, there are at least two ways of finding the solution to this problem:
-
We could plot the cost function. The plot is now 3D — the “x” and “y” axes are
and , and the “z” axis is . The shape of the plot is a bowl. It’s hard to tell where the minimum is from looking at the bowl, so I’ve also plotted contours of the cost function underneath. “Contours” are like the lines on a topographic map. From the contours, it looks like the minimum is at . 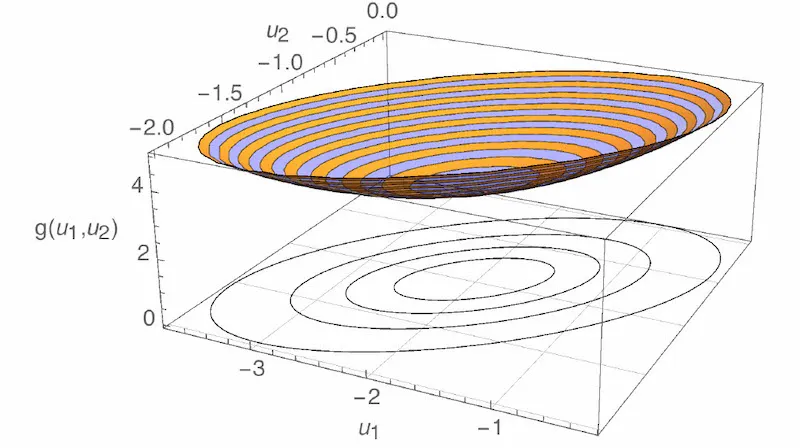
-
We could apply the first derivative test. We compute the partial derivative of
with respect to both and : Then, we set both partial derivatives equal to zero and solve for
and : As before, we would have to apply a further test in order to verify that this choice of
is actually a minimum. But it is certainly consistent with what we observed above. Here is a plot of each partial derivative as a function of and . The shape of each plot is a plane (i.e., a flat surface). Both planes are zero at : 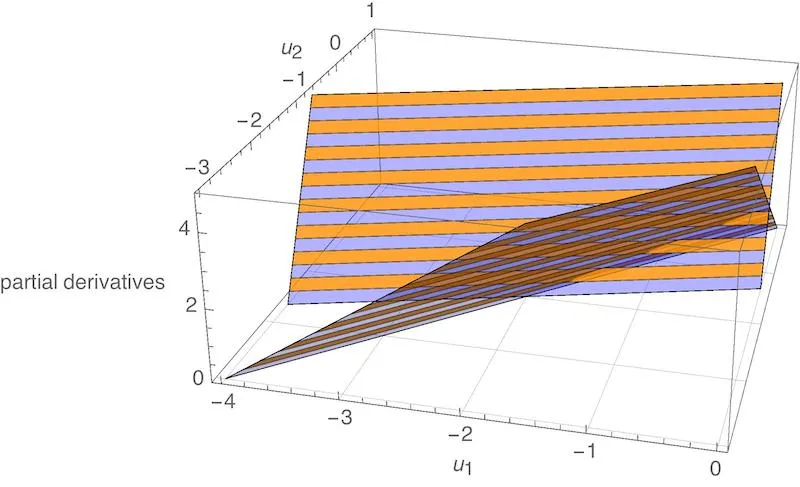
An equivalent way of stating this same optimization problem would have been as follows:
You can check that the cost function shown above is the same as the cost function we saw before (e.g., by multiplying it out). We could have gone farther and stated the problem as follows:
We have returned to having just one decision variable
This example is exactly
the same as the previous example, except that the two decision variables
(now renamed
We are no longer free to choose
Then, we plug this result into the cost function:
By doing so, we have shown that solving the constrained optimization problem
is equivalent to solving the unconstrained optimization problem
and then taking
The point here was not to show how to solve constrained optimization problems in general, but rather to identify the different parts of a problem of this type. As a quick note, you will sometimes see the example optimization problem we’ve been considering written as
The meaning is exactly
the same, but
“Among all choices of
for which there exists an satisfying , find the one that minimizes .”
Minimum vs. Minimizer
We have seen three example problems. In each case, we were looking for the minimizer, i.e., the choice of decision variable that made the cost function as small as possible:
-
The solution to
was
. -
The solution to
was
. -
The solution to
was
.
It is sometimes useful to focus on the minimum instead of on the minimizer, i.e., what the “smallest value” was that we were able to achieve. When focusing on the minimum, we often use the following “set notation” instead:
-
The problem
is rewritten
The meaning is to “find the minimum value of
over all choices of .” The solution to this problem can be found by plugging in what we already know is the minimizer, . In particular, we find that the solution is . -
The problem
is rewritten
Again, the meaning is to “find the minimum value of
over all choices of and .” We plug in what we already know is the minimizer to find the solution — it is . -
The problem
is rewritten
And again, the meaning is to “find the minimum value of
over all choices of for which there exists satisfying .” Plug in the known minimizer, , and we find that the solution is 15.
The important thing here is to understand the notation and to understand the difference between a “minimum” and a “minimizer.”
Statement of the problem
The following thing is called an optimal control problem:
Let’s try to understand what it means.
-
The statement
says that we are being asked to choose an input trajectory
that minimizes something. Unlike in the optimization problems we saw before, the decision variable in this problem is a function of time. The notation is one way of indicating this. Given an initial time and a final time , we are being asked to choose the value of at all times in between, i.e., for all . -
The statement
is a constraint. It implies that we are restricted to choices of
for which there exists an satisfying a given initial condition and satisfying the ordinary differential equation
One example of an ordinary differential equation that looks like this is our usual description of a system in state-space form:
-
The statement
says what we are trying to minimize — it is the cost function in this problem. Notice that the cost function depends on both
and . Part of it, , is integrated (i.e., “added up”) over time. Part of it, , is applied only at the final time. One example of a cost function that looks like this is
The HJB equation (our new “first-derivative test”)
As usual, there are a variety of ways to solve an optimal control problem. One way is by application of what is called the Hamilton-Jacobi-Bellman Equation, or “HJB.” This equation is to optimal control what the first-derivative test is to optimization. To derive it, we will first rewrite the optimal control problem in “minimum form” (see “Minimum vs Minimizer”):
Nothing has changed here, we’re just asking for the minimum and not the minimizer. Next, rather than solve this problem outright, we will first state a slightly different problem:
The two changes that I made to go from the original problem to this one are:
-
Make the initial time arbitrary (calling it
instead of ). -
Make the initial state arbitrary (calling it
instead of ).
I also made three changes in notation. First, I switched from
You should think of the problem (2)
as a function itself. In goes an initial time
We call
The reason this equation is called a “recursion” is that
it expresses the function
from the first part and the cost
from the second part (where "
We now proceed to approximate the terms in (4) by first-order series expansions. In particular, we have
and we also have
If we plug both of these into (4), we find
Notice that nothing inside the minimum depends on anything other than
Also, notice that
does not depend
on
To simplify further, we can
subtract
The equation is called the Hamilton-Jacobi-Bellman Equation, or simply the HJB equation. As you can see, it is a partial differential equation, so it needs a boundary condition. This is easy to obtain. In particular, going all the way back to the definition (3), we find that
The importance of HJB is that if you can find a
solution to (5)-(6) — that is, if you can find a function
Statement of the problem
Here is the linear quadratic regulator (LQR) problem:
It is an optimal control problem — if you define
then you see that this problem has the same form as (1). It is
called “linear” because the dynamics are those of a linear (state space)
system. It is called “quadratic” because the cost is quadratic (i.e.,
polynomial of order at most two) in
The matrices
What this notation
means is that
Do the matrices Q, R, and M really have to be symmetric?
Suppose
First, notice that
In fact,
Second, notice that we can replace
So, it is not that
Solution to the problem
Our “Solution approach” tells us to solve the LQR problem in two steps.
First, we find a function
What function
This function has the form
for some symmetric matrix
This is matrix calculus (e.g., see wikipedia or Chapter A.4.1 of Convex Optimization (Boyd and Vandenberghe)). The result on the left should surprise no one. The result on the right is the matrix equivalent of
You could check that this result is correct by considering an example. Plug these partial derivatives into HJB and we have
To evaluate the minimum, we apply the first-derivative test (more matrix calculus!):
This equation is easily solved:
Plugging this back into (7), we have
In order for this equation to be true for any
In summary, we have found that
solves the HJB equation, where
backward in time, starting from
Now that we know
for
LQR Code
Here is how to find the solution to an LQR problem with Python:
Text successfully copied to clipboard!
import numpy as np
from scipy import linalg
def lqr(A, B, Q, R):
# Find the cost matrix
P = linalg.solve_continuous_are(A, B, Q, R)
# Find the gain matrix
K = linalg.inv(R) @ B.T @ P
return K