Dynamical Systems Theory
Dynamical systems theory is a mathematical framework used to describe the evolution of systems over time. A dynamical system is characterized by a set of differential equations that describe how the state of a system evolves based on its current state and external inputs. Mathematically, a dynamical system is expressed as a set of first-order ordinary differential equations (ODEs):
where
For specific initial conditions solutions to the above equations can most often be found either by using analytical or numerical methods for ODEs. In contrast, dynamical systems theory aims at understanding how the entire system behaves both qualitatively and quanitatively, which includes - but is not limited to - potentially stable or unstable behavior, equilibria in state space, and/or strong dependence of the system behavoir on parameters (e.g. bifurcations).
Heads up!
Dynamical systems theory is equally capable of dealing with ordinary differential equations beyond first order.
Formally an
can be rewrtitten as a system of
through introducing a set of new variables
Equilibrium Points
Understanding equilibrium points is a cornerstone of dynamical systems theory, offering a window into both local and global properties of complex systems. An equilibrium point (or fixed point) is a state of the system where the evolution ceases, meaning the system remains at rest if it starts at that point. For a system described by
an equilibrium point
Equilibrium points are central to understanding the long-term behavior of dynamical systems because they often organize the motion of nearby trajectories. By analyzing their stability, one can predict whether small deviations from equilibrium will decay over time, grow uncontrollably, or persist in a neutral fashion.
Heads up!
Studying equilibrium points provides deep insight into the qualitative behavior of a system. They identify the location of steady states and often shape the global organization of trajectories in nonlinear systems, with stable and unstable manifolds acting as pathways that govern the flow of the system. As such studying equilibria in dynamical systems can guide the design of control strategies aimed at stabilizing desired states.
Linearization
Near an equilibrium point, it is common to linearize the system by expanding
where
The power of linarization becomes evident when we recall that a (full rank) system of linear ODEs permits a general solution of the form
where
Stable and Unstable Manifolds
A common scenario is that the matrix
This system has an equilibrium at
with
In this context, 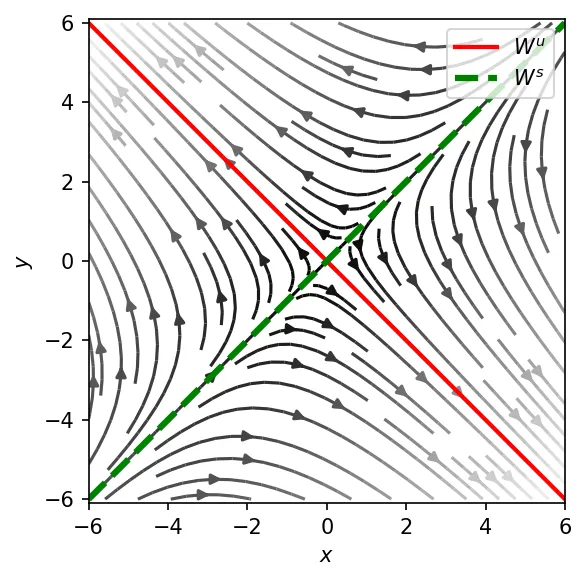
Formally, if
- Stable manifold
as (tangent to) a subspace of a dynamical system where trajectories approach the equilibrium as .
- Unstable manifold
as (tangent to) a subspace of a dynamical system departing from an equilibrium as .
- Center manifold
as (tangent to) a (possibly non-unique) subspace of a dynamical system that is spanned by Eigenvalues with zero real part, i.e., .
Stable and unstable manifolds do not have to be one-dimensional. The dimensions of the linear subspaces, and, thus, the manifolds themselves are determined by the eigenvalues of
Let
Then:
with
Intuitively, the stable manifold spans the directions along which perturbations decay to
Bifurcations
A far reaching result in dynamical systems theory is that the behavior of the system can also depend on parameters, for instance, additive or multiplicative constants. A so-called bifurcation occurs when a small smooth change in a system parameter causes a qualitative change in the system’s long-term behavior. Bifurcations indicate where the number or stability of equilibrium points (or periodic orbits) changes, fundamentally altering the system’s dynamics.
Consider a dynamical system depending on a parameter
where
Heads up!
Bifurcation analysis is a central tool in understanding how seemingly innocuous parameters cause systems to transition between different behaviors, such as from steady states to oscillations which can be critical in the design of flight and control systems.
One-Parameter Bifurcations
Common examples of bifurcations in one-parameter systems include:
-
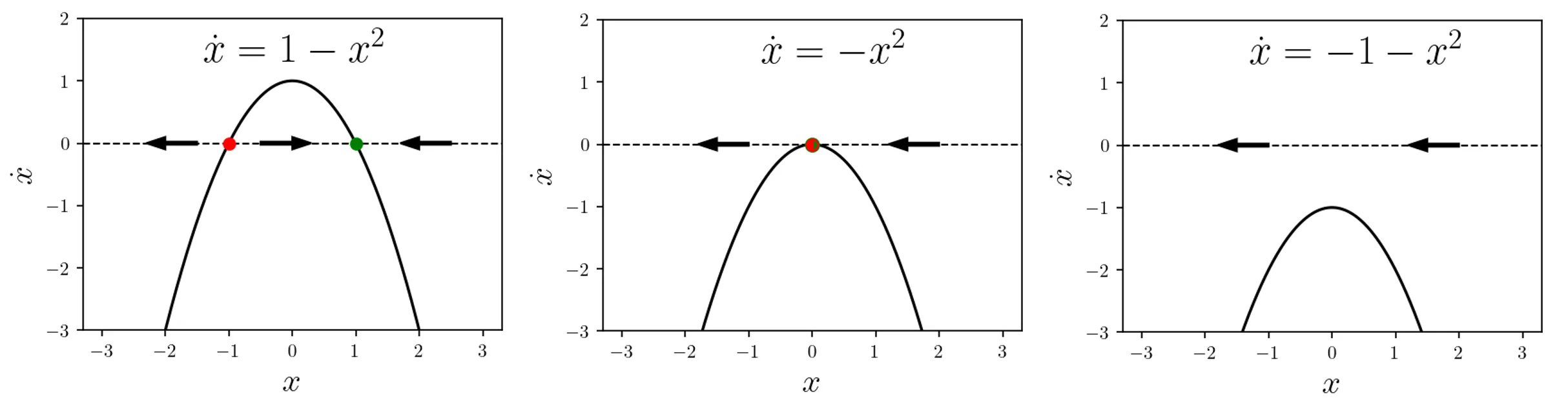
Saddle-node bifurcations: Two equilibria (one stable, one unstable) “collide and annihilate” each other as
crosses a critical value. Take for example For
, there are no real equilibria, since implies that . For , a single equilibrium exists at . For , two equilibria appear at , one stable and one unstable. The figure below shows this behavior for
-
Pitchfork bifurcations: A symmetric equilibrium loses stability and two new equilibria emerge:
For
, is stable. For , becomes unstable and two stable equilibria appear at . -
Hopf bifurcations: An equilibrium point loses stability and a small-amplitude limit cycle emerges.
Two-Parameter Bifurcations
When a system depends on two parameters,
more complex bifurcation structures can occur.
Curves in the